Detalhes precisos:
L298N L298P Módulo controlador de motor de canal duplo 4A Motor Shield R3 Para
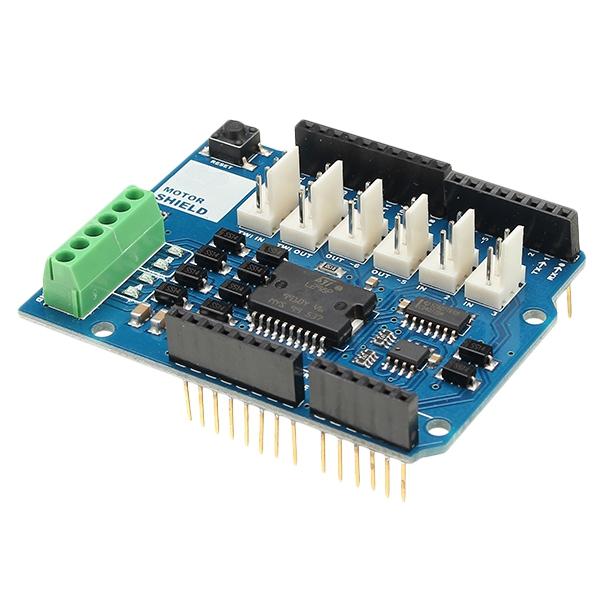
Descrição: O Motor Shield é baseado no L298, que é um driver de ponte completa dupla projetado para acionar cargas indutivas, como relés, solenóides, motores DC e motores de passo. Ele permite que você acione dois motores DC com sua placa, controlando a velocidade e direção de cada um de forma independente. Você também pode medir a absorção de corrente do motor de cada motor, entre outras características. O shield é
TinkerKit compatível, o que significa que você pode criar rapidamente projetos conectando
TinkerKit módulos na placa.
Funcionalidade: - Tensão de trabalho: 5V ~ 12V
- Controlador do motor:
L298Pcontrola 2 motores DC ou 1 motor de passo
- Corrente máxima: 2A por canal ou 4A máximo (com fonte de alimentação externa)
- Detecção de corrente: 1,65V/A
- Função de parada e freio em corrida livre
Sobre o poder: A Placa de Motor deve ser alimentada apenas por uma fonte de alimentação externaPorque o CI L298 montado no shield possui duas conexões de energia separadas, uma para a lógica e uma para o suprimento de energia do motor. A corrente do motor necessária frequentemente excede a classificação máxima de corrente USB.
A alimentação externa (não-USB) pode vir de um adaptador de corrente alternada para corrente contínua (wall-wart) ou de uma bateria. O adaptador pode ser conectado através da inserção de um plugue de 2,1 mm com polaridade central positiva na entrada de energia da placa onde o motor shield está montado ou conectando os fios que levam a fonte de alimentação aos terminais de parafuso Vin e GND, tendo o cuidado de respeitar as polaridades.
Para evitar possíveis danos à placa em que o escudo está montado,
Recomendamos o uso de uma fonte de alimentação externa que forneça uma tensão entre 7 e 12VSe o seu motor requer mais do que 9V, recomendamos que você separe o cabo de alimentação do shield e a placa na qual o shield está montado. Isso é possível cortando o jumper "Vin Connect" localizado na parte de trás do shield.
O limite absoluto para o Vin nos terminais de parafuso é de 18V.
Os pinos de alimentação são os seguintes:
Vin no bloco de terminais de parafuso, a tensão de entrada para o motor está conectada ao aterramento. Uma fonte de alimentação externa conectada a esse pino também fornece energia para a placa onde ele está instalado. Ao cortar o jumper "Vin Connect", você transforma isso em um cabo de alimentação dedicado para o motor.
GND Aterrar no bloco de terminais de parafuso.
O escudo pode fornecer 2 amperes por canal, totalizando 4 amperes no máximo. Sobre entrada e saída: Este escudo possui dois canais separados, chamados A e B, que cada um utiliza 4 dos pinos para controlar ou detectar o motor. No total, há 8 pinos em uso neste escudo. Você pode usar cada canal separadamente para controlar dois motores DC ou combiná-los para controlar um motor de passo unipolar.
Os pinos do escudo, divididos por canal, estão mostrados na tabela abaixo:
| Função | alfinetes por Ch. A | botões por Ch. B |
| Direção | D12 | D13 |
| PWM | D3 | D11 |
| Freio | D9 | D8 |
| Detecção de corrente | A0 | A1 |
Se você não precisa do freio e do sensor de corrente e também precisa de mais pinos para o seu aplicativo, você pode desativar esses recursos cortando os jumpers correspondentes na parte de trás do shield.
As tomadas adicionais no escudo são descritas da seguinte forma:
Terminal de parafuso para conectar os motores e sua fonte de alimentação.
2 conectores TinkerKit para duas Entradas Analógicas (em branco), conectados a A2 e A3.
2 conectores TinkerKit para duas saídas analógicas (em laranja no meio), conectados às saídas PWM nos pinos D5 e D6.
2 conectores TinkerKit para a interface TWI (em branco com 4 pinos), um para entrada e outro para saída. Conexões dos motores: Motor CC com escovas. É possível acionar dois motores CC com escovas conectando os dois fios de cada um nos terminais de parafuso (+) e (-) para cada canal A e B. Dessa forma, você pode controlar sua direção definindo como HIGH ou LOW os pinos DIR A e DIR B, você pode controlar a velocidade variando os valores do ciclo de trabalho PWM A e PWM B. Os pinos Freio A e Freio B, se definidos como HIGH, efetivamente freiam os motores CC em vez de deixá-los diminuir a velocidade cortando a energia. Você pode medir a corrente que passa pelo motor CC lendo os pinos SNS0 e SNS1. Em cada canal, haverá uma voltagem proporcional à corrente medida, que pode ser lida como uma entrada analógica normal, por meio da função analogRead() nas entradas analógicas A0 e A1. Para sua conveniência, ele é calibrado para ser de 3,3V quando o canal está fornecendo sua corrente máxima possível, ou seja, 2A.
Pacote incluído: 1 x Módulo de Driver de Motor