Detalhes precisos:
Dicas
1. INAV, DSHOT não pode funcionar em S3, S5, S7 devido a um conflito DMA, por favor use ONESHOT ou MULTISHOT e calibre o intervalo de PWM do ESC.
2. BetaFlight, defina dshot_bitbang = ON ao usar X6 e X8 DSHOT.
3. BetaFlight, o nome do alvo foi renomeado para MatekF405TE_SD
4. ArduPilot, defina LOG_BACKEND_TYPE = 1 (File) para o registro no cartão SD
Especificações
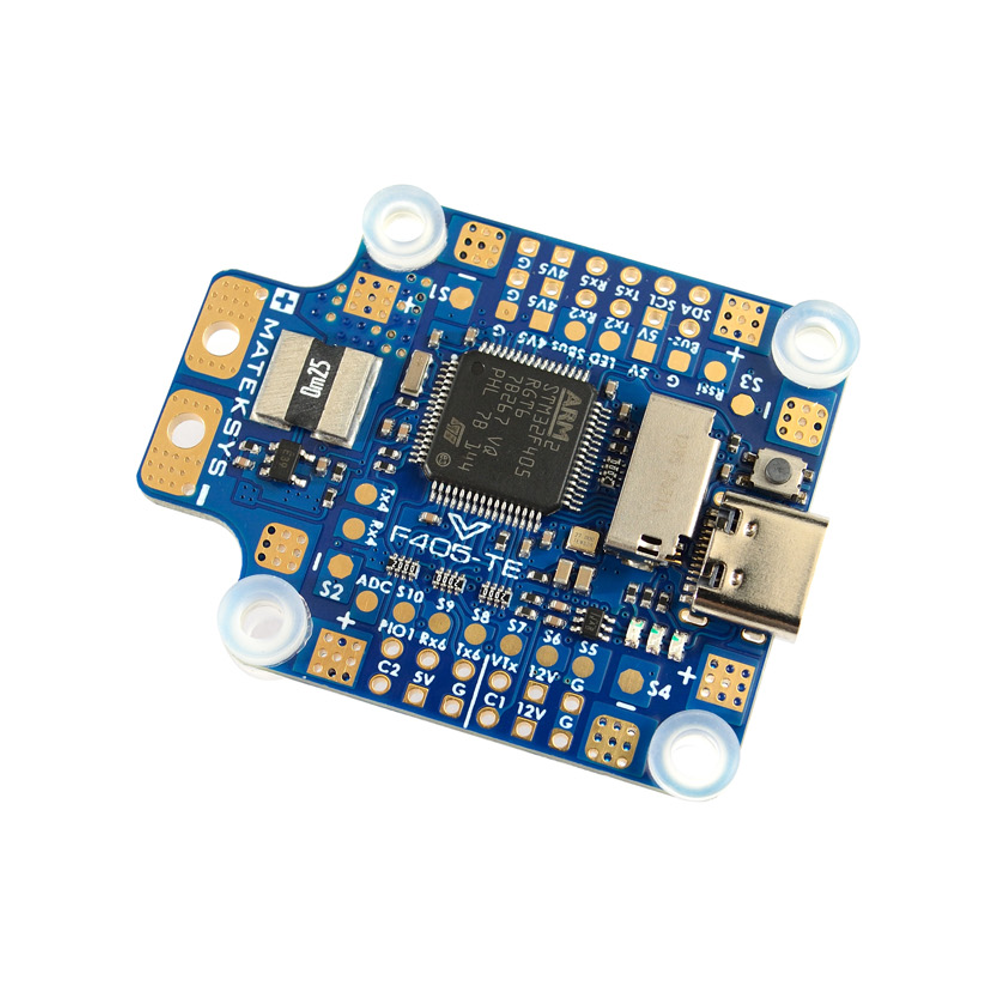
MCU: STM32F405RGT6, 168MHz
IMU: ICM42688-P (SPI)
Baro: SPL06-001 (I2C)
OSD: AT7456E (SPI)
Blackbox: slot MicroSD (SPI)
6x UARTs, 1x opção Softserial_Tx (INAV/BF)
11 saídas PWM (8 compatíveis com Dshot para BF/ArduPilot)
1x I2C
4x ADC (VBAT, Corrente, RSSI, Velocidade do ar)
1x PINIO de reposição
4x almofadas individuais de energia/sinal ESC
1x Grupo de almofadas G/S1/S2/S3/S4 para sinal/comum de ESC 4 em 1
Inversor embutido em UART2-RX para entrada SBUS
Entrada de câmera dupla comutável
Especificações do PDB
9 ~ 36V (3 ~ 8S LiPo)
PDB: 4x 35A (Máx. 4x 50A)
BEC: 5V 1.5A
BEC: 12V 2A
LDO 3.3V: 200mA
Sensor atual: 220A, ADC 3.3V (escala INAV/BF 150, ArduPilot 66.7 A/V)
Divisor de tensão da bateria 1K:20K (escala INAV 2100, escala BF 210, multiplicador de tensão ArduPilot BATT_VOLT_MULT 21.0)
Firmware
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD
BetaFlight: MATEKF405TE_SD
Físico
Montagem: 30.5 x 30.5 mm, Φ4 mm com ilhós Φ3 mm
Dimensões: 36 x 46 mm
Peso: 10g
Incluindo
1x F405-TE
6x arruelas de silicone M4 para M3
1x Rubycon ZLH 35V/470uF (baixo ESR)
Layout e cabeamento

Mapeamento INAV/BF
Mapeamento do ArduPilot
Telemetria Frsky Smartport
sinal não invertido (hackeado) S.Port
qualquer Uart_TX sobressalente
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 ou 10 (para yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIAL4_PROTOCOL = 33
MSP_OPTIONS = 0 (modo de sondagem)
Relé (PINIO)
PINIO1, placa PIO1, nível baixo por padrão
PINIO2, Interruptor de câmera, C1 LIGADO por padrão
#
PA4 PINIO1 SAÍDA GPIO(81) BAIXO //Pin PIO1
PB5 PINIO2 SAÍDA GPIO(82) BAIXO //interruptor da câmera
# RCx_OPTION: opção de entrada RC
28 Relé Ligado/Desligado
34 Relay2 Ligado/Desligado
35 Relé3 Liga/Desliga
36 Relé4 Ligado/Desligado
por exemplo
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Relé Ligado/Desligado, Use CH7 do Transmissor para controlar o nível baixo/alto de PIO1
RELAY_PIN2 82 //Interruptor da câmera GPIO
RC8_OPTION 34 //Relé2 Ligado/Desligado, Use CH8 do transmissor para controlar o nível alto/baixo no terminal PB5
A função configurada será acionada quando o valor pwm do interruptor auxiliar se tornar maior que 1800. Será desativada quando o valor cair abaixo de 1200.
Verifique o valor pwm enviado pelo transmissor quando o interruptor estiver alto e baixo usando a tela de Calibração de Rádio em Configuração Inicial >> Hardware Obrigatório >> Planner de Missões. Se ele não ultrapassar 1800 ou ficar abaixo de 1200, é melhor ajustar os pontos finais do servo no transmissor.
Dicas
- F405-TE tem o firmware INAV pré-carregado para QC
- ajuste a taxa de PWM do BLHeli32 ESC para 48kHz ou superior no BLHeliSuite
ArduPilot
Aviso de erros internos 0x4000 l:213 spi_fail do firmware ArduPilot, por favor, defina LOG_BACKEND_TYPE = 1 (Arquivo) para registrar no cartão SD. Baixe o firmware ArduPilot em AQUI.
INAV
Com o firmware INAV, o DSHOT não pode ser usado em S3, S5, S7 devido a um conflito DMA. Por favor, use ONESHOT ou MULTISHOT e calibre a faixa de PWM do ESC.
Baixe o firmware INAV 4.1.x do site Matck. INAV5.x ou superior diretamente do configurador INAV.
BetaFlight
Se estiver usando um buzzer passivo de 5V, digite na CLI «set beeper_frequency = 2500»
O alvo MATEKF405TE_SD foi suportado desde BF4.4.
Definir dshot_bitbang = ON ao usar DSHOT X6 e X8,
Você pode baixar o BF 4.3 diretamente do configurador da BF, o BF 4.2.x de Aqui.
O barômetro SPL06-001 não é suportado pelo Betaflight.