Detalhes precisos:
Especificações de FC
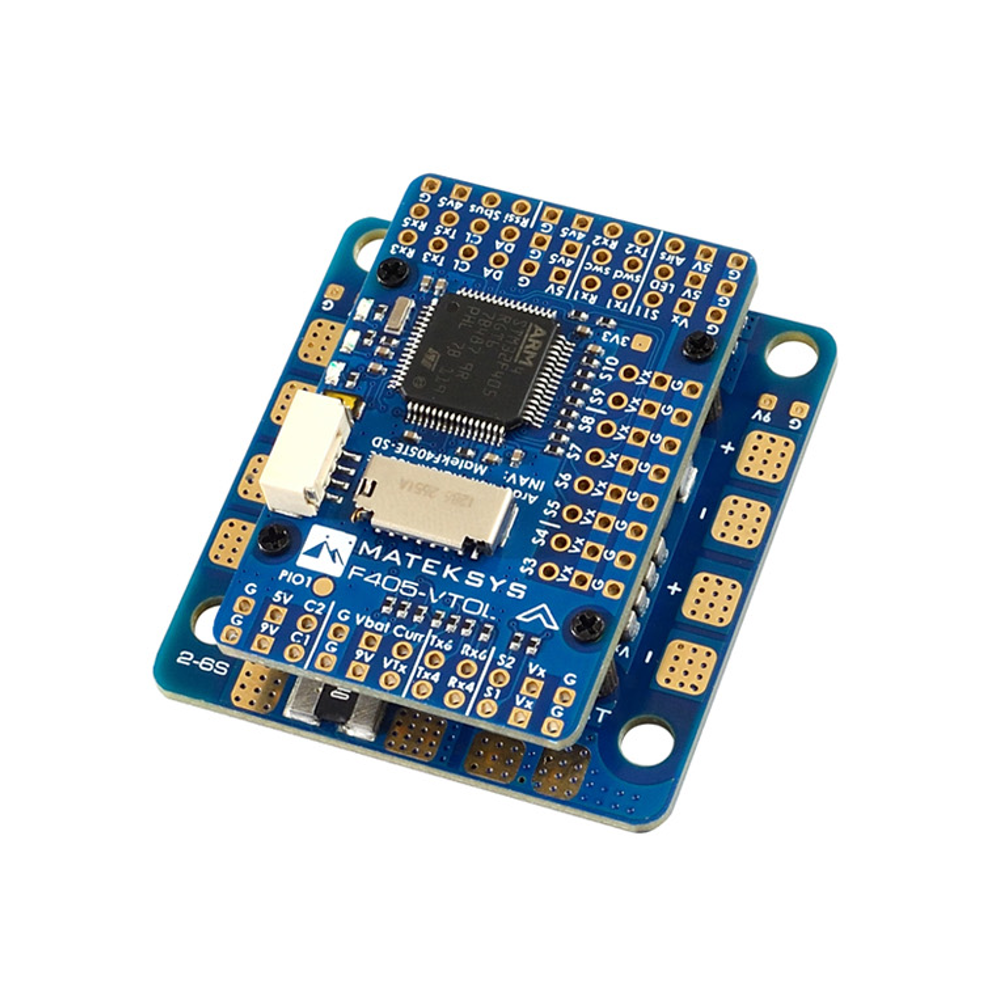
MCU: STM32F405RGT6, 168MHz, 1MB Flash
IMU: ICM42688-P
Baro: SPL06-001
OSD: AT7456E
Caixa-preta: slot para cartão MicroSD
6x UART, 1x opção Softserial_Tx(INAV)
12x Saídas PWM
1x I2C
4x ADC (VBAT, Corrente, RSSI, Velocidade do ar)
1x PINIO de reposição
Extensor USB/Bip com Type-C(USB2.0)
Inversor embutido em UART2-RX para entrada SBUS
Entrada de câmera dupla comutável
FC Firmware
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD (INAV 5.0 ou mais recente)
Firmware para Controlador de Voo Clique aqui
PDB
Faixa de tensão de entrada: 6.8-30V (2-6S LiPo)
Resistor de sentido: 100A contínuo, 220A de pico
5x almofadas de energia ESC, total contínuo de 100A
Suporta carga contínua de até 100A no terminal ESC próximo ao resistor do sensor de corrente
Suporte de carga contínua de até 30A e pico de 50A em cada almofada ESC do Quadcopter
Divisor de tensão da bateria 1K:20K (Escala 2100 em INAV, BATT_VOLT_MULT 21.0 em ArduPilot)
Sensor atual: 220A, ADC 3.3V (Escala 150 em INAV, 66.7 A/V em ArduPilot)
Saída BEC 5V
Projetado para controlador de voo, receptor, OSD, câmera, buzzer, fita de LED 2812, módulo GPS, AirSpeed
Corrente contínua: 2 amperes
Saída BEC 9V / 12V
Projetado para transmissor de vídeo, câmera, gimbal, etc.
Corrente contínua: 2 amperes
Opção de 12V com pad de jumper
para uma saída estável de 9V/12V, a tensão de entrada deve ser maior que a tensão de saída +1V
Saída BEC Vx
Projetado para servos
Tensão ajustável, 5V padrão, 6V ou 7,2V via jumper
Corrente contínua: 8 Amperes, pico de 10A
para uma saída Vx estável, a tensão de entrada deve ser maior que a tensão Vx +1V
Saída BEC de 3.3V
Projetado para módulo de barômetro/bússola e periféricos externos de 3,3V
Regulador linear
Corrente contínua: 200mA
Físico
Montagem: 25 x 25mm-Φ2mm, 35 x 35mm-Φ4mm
Dimensões: 45 x 42 x 15 mm
Peso: 25g com adaptador USB/buzzer
Incluindo
1x F405-VTOL
Extensor 1x USB (Tipo-C) / Buzzer Passivo (sinal sonoro) + cabo JST-SH-6P para JST-SH-6P de 20 cm para extensor USB.
Cabo 1x 20cm JST-GH-4P para JST-GH-4P para porta I2C
1x capacitor Rubycon ZLH 35V 470uF
Pinos Dupont 2.54 (A placa é enviada sem solda)
Layout

Cabeamento VTOL (ArduPlane)
Fiação normal do avião (INAV)
Mapeamento INAV
PINIO
PINIO1 /PIO1 pad, nível baixo por padrão, comutável para nível baixo/alto por meio do modo USER1
PINIO2 é para alternar a entrada da câmera por Meios-USER2
Dicas
F405-VTOL possui INAV fw pré-carregado para QC
Baixe INAV (Alvo MATEKF405TE_SD) fw 5.x ou mais recente diretamente do INAV configurator 5.x ou mais recente.
Mapeamento do ArduPilot
Telemetria Frsky Smartport
sinal não invertido (hackeado) S.Port
qualquer Uart_TX sobressalente
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 ou 10 (para yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIALx_PROTOCOL = 33
MSP_OPTIONS = 0 (modo de sondagem)
Relé (PINIO)
PINIO1, placa PIO1, nível baixo por padrão
PINIO2, Interruptor de câmera, C1 LIGADO por padrão
#
PA4 PINIO1 SAÍDA GPIO(81) BAIXO //Pin PIO1
PB5 PINIO2 SAÍDA GPIO(82) BAIXO //interruptor da câmera
# RCx_OPTION: Opção de entrada RC
28 Relé Ligado/Desligado
34 Relay2 Ligado/Desligado
35 Relé3 Liga/Desliga
36 Relé4 Ligado/Desligado
por exemplo
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Relé Ligado/Desligado, Use CH7 do Transmissor para controlar o nível baixo/alto de PIO1
RELAY_PIN2 82 //Interruptor da câmera GPIO
RC8_OPTION 34 //Relé2 Ligado/Desligado, Use CH8 do transmissor para controlar o nível alto/baixo no terminal PB5
O recurso configurado será acionado quando o valor de pwm do interruptor auxiliar ultrapassar 1800. Será desativado quando o valor cair abaixo de 1200.
Verifique o valor pwm enviado pelo transmissor quando o interruptor estiver alto e baixo,usando a tela de calibração de rádio em Configuração Inicial >> Hardware Obrigatório >> Mission Planner. Se não subir acima de 1800 nem descer abaixo de 1200,é melhor ajustar os pontos finais do servo no transmissor.
Dicas
F405-VTOL possui INAV fw pré-carregado para QC
O alvo MATEKF405TE_SD não está listado no INAV Configurator 4.x.x, é suportado pelo INAV5.0 ou posterior
ArduPilot fw, 'Erros internos 0x4000 l:213 spi_fail' aviso, por favor, defina LOG_BACKEND_TYPE = 1 (Arquivo) para o registro no cartão SD.